
控制系统分析基础
Title: Basics of Control System Analysis
Lecture @ 2026-3-16
控制系统简介
Section titled “控制系统简介”控制系统 (Control System) 是一种使用了控制技术的系统,它有广泛的使用场景,比如功率放大、远程控制等。他有方便的输入形式,同时对外部干扰也能有很强的补偿能力。
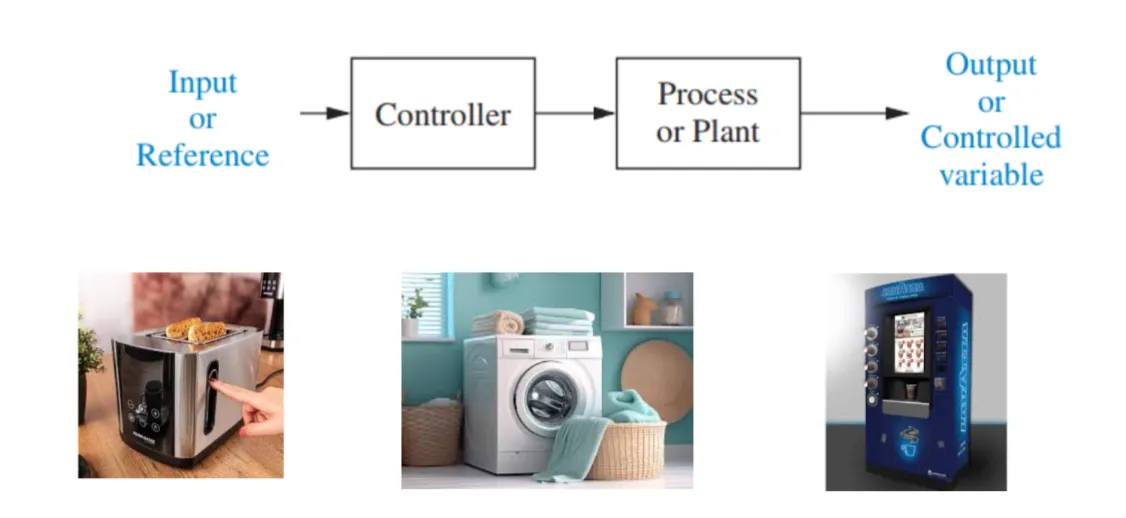
一个常见的控制方式是 开环控制 (Open-Loop Control),它的输入和输出之间没有反馈关系。比如说一个简单的烤面包机,用户设置一个时间,面包机会在这个时间结束后弹出面包。这个系统的输入是时间,输出是面包的状态(是否弹出)。如果用户设置的时间不合适,面包可能会烤得过熟或者不熟。
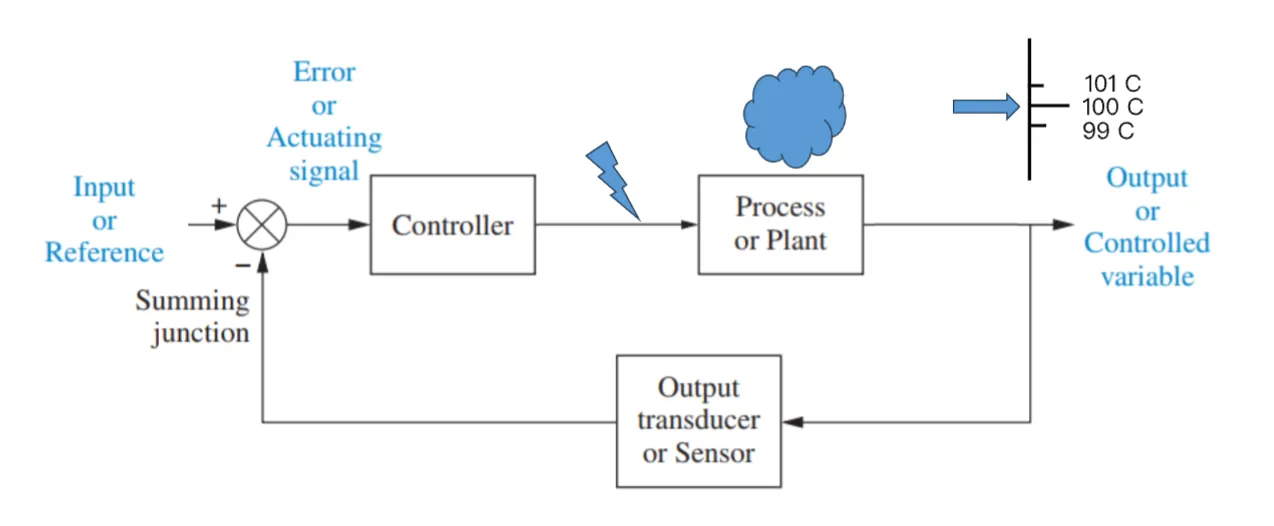
而另一种控制方式, 闭环控制 (Closed-Loop Control),则解决了这个问题。它通过 反馈机制 把系统的输出信息反馈到输入端,从而调整系统的行为,最终实现了更好的性能和稳定性。
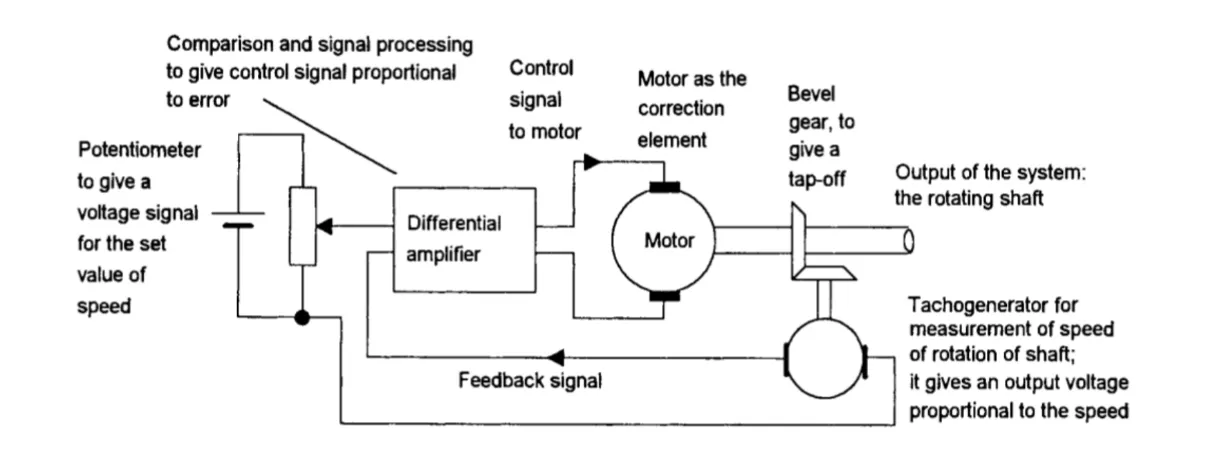
比如说电机转速控制系统。输入是电压,输出是转速。通过测量转速并将其反馈到输入端,系统可以调整电压以保持所需的转速,即使负载发生变化或者外部干扰存在。
要设计一个控制系统,我们通常要经历如下几个步骤:
- 根据需求确定物理系统及其规格要求
- 绘制功能框图
- 将物理系统转化成原理图
- 利用原理图获得框图、信号流图或状态空间表达式
- 若存在多个模块,将框图简化为单个模块或闭环系统
- 分析、设计与测试,验证是否满足需求和规格要求
其中,框图 (Block Diagram) 是一种用于时域、频域分析与设计的常用工具。它由基础的功能块组成,表示系统组件间的互联以及信号流向。
框图 (Block Diagram)
Section titled “框图 (Block Diagram)”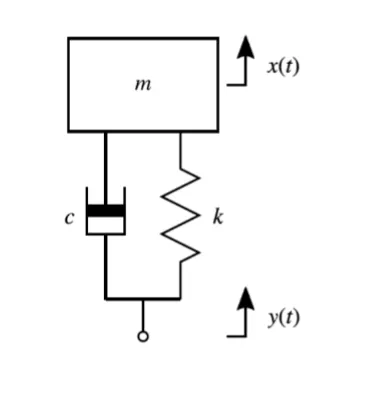
从这个简单的情况下手:这是一个简单的机械系统,输入是 ,响应为 ,系统的运动方程是
对他使用 拉普拉斯变换,使用零初始条件,可以得到他的传递函数
那么,这个系统的框图就可以画成下面这个样子:
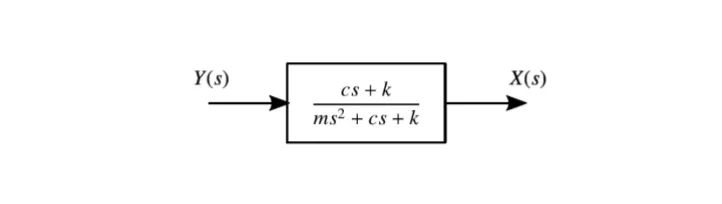
其中,输入是 ,输出是 ,系统的传递函数是 。
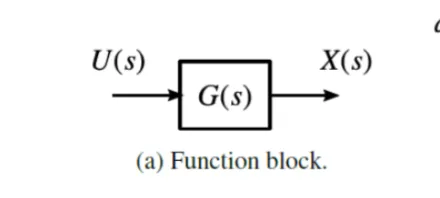
一般来说,具有输入 ,响应 , 传递函数 的系统元素都可以表示为下图的单个模块:
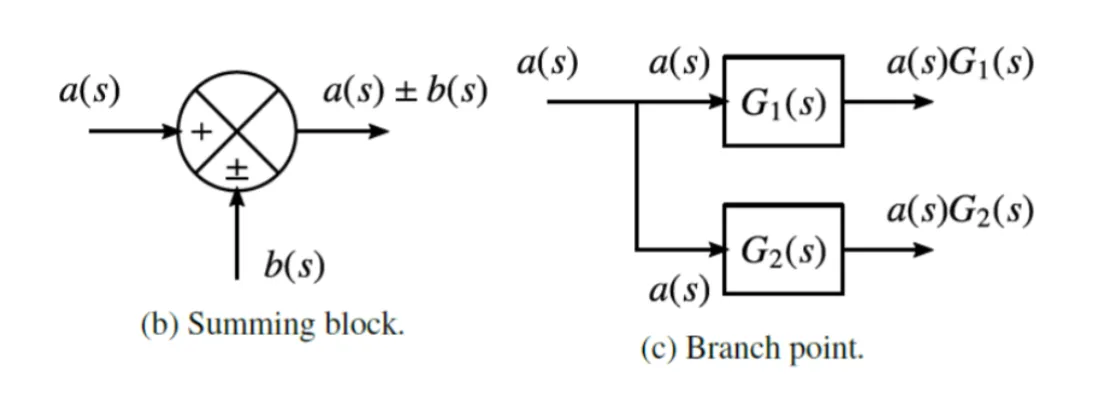
如果一个系统由多个组件组成,则各个模块之间使用箭头连接,显示信号流动的方向。信号之间进行比较的地方被称为 求和点 (Summation Point),它用一个圆圈表示,里面有一个加号或者减号,表示输入信号的加权和。同一个信号分支的地方叫做 分支点 (Branch Point),它表示允许信号同时流向多个模块。
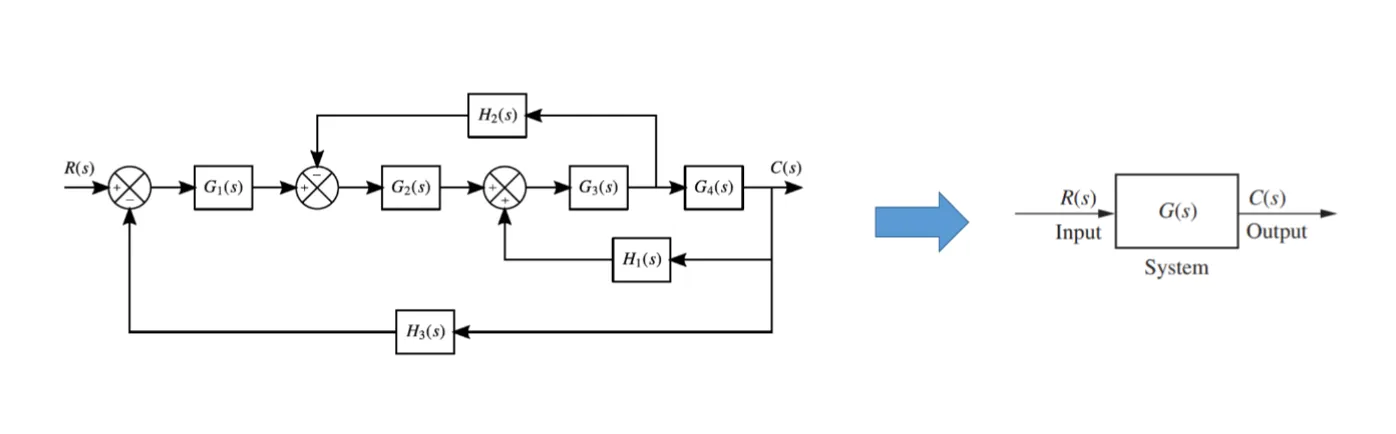
一个控制系统在结构上或者设计上可能非常复杂,对应的方框图可能也非常复杂,它会显示系统的所有输入、输出和扰动。
我们可以把框图简化成一个简单的传递函数,它关联单个输入与单个输出,可以通过应用七条基本规则来实现
级联两个信号
Section titled “级联两个信号”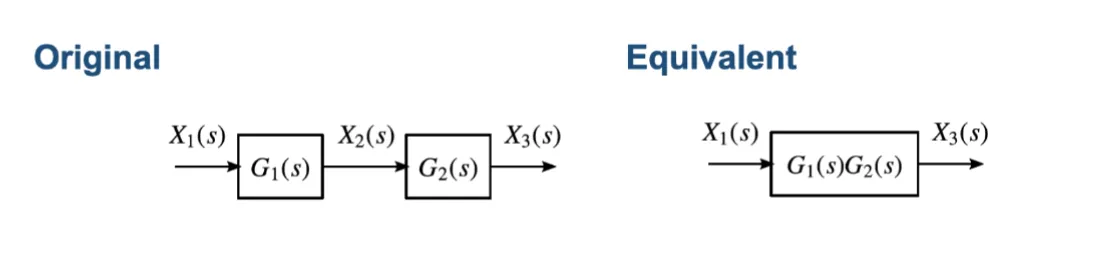
如果有两个串联的块,传递函数分别为 和 ,那么它们的等效传递函数就是 。
求和两个信号
Section titled “求和两个信号”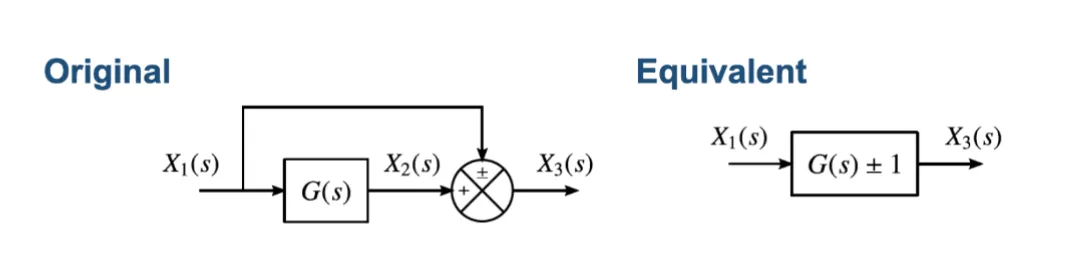
如果有一个信号是两个块的求和,传递函数分别为 和 ,那么它们的等效传递函数就是 。
类似的,有系数的情况,如果有一个信号是 ,那么它们的等效传递函数就是 。
求和点移到块后方
Section titled “求和点移到块后方”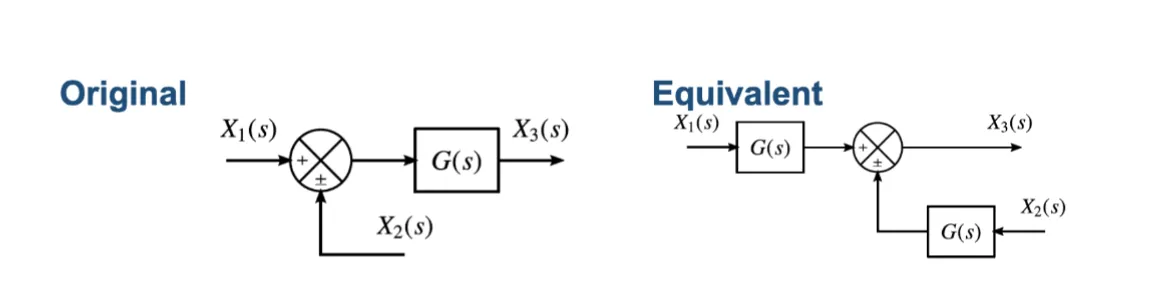
如果 和 是求和点的输入, 是块的传递函数,那么它们的等效传递函数就是 ,相当于是把 和 分别求得后再求和。
求和点移到块前方
Section titled “求和点移到块前方”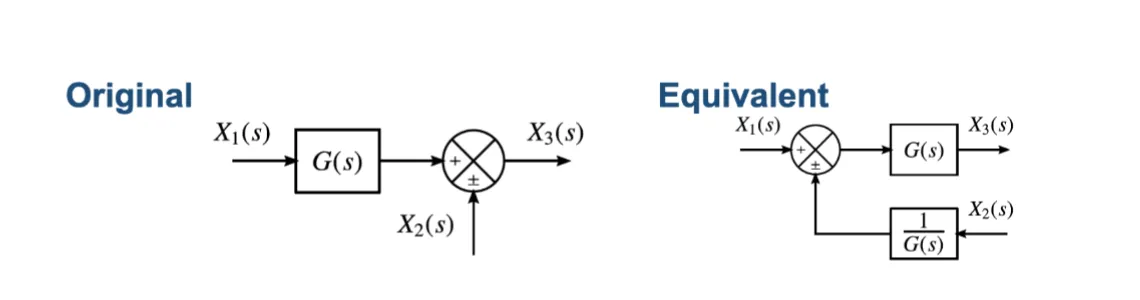
类似的,如果 和 是求和点的输入, 是块的传递函数,那么它们的等效传递函数就是 ,相当于是把 和 求和后再通过块 。
把分支点移到块之前
Section titled “把分支点移到块之前”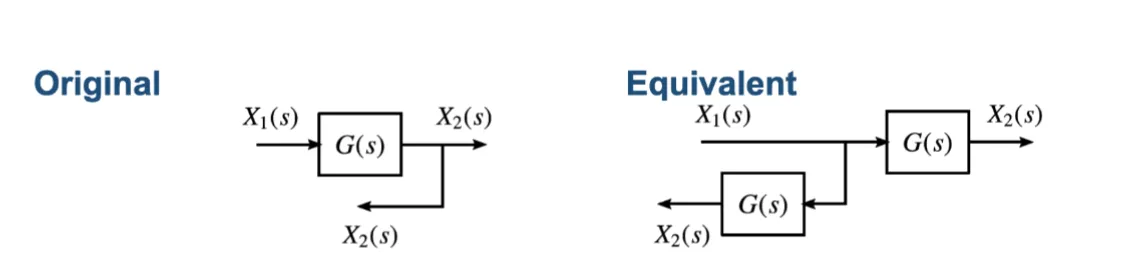
如果在块 的输出处有一个分支点,那么等效于把分支点提到块的输入处,每条分支路径上都有一个相同的块 。
把分支点移到块之后
Section titled “把分支点移到块之后”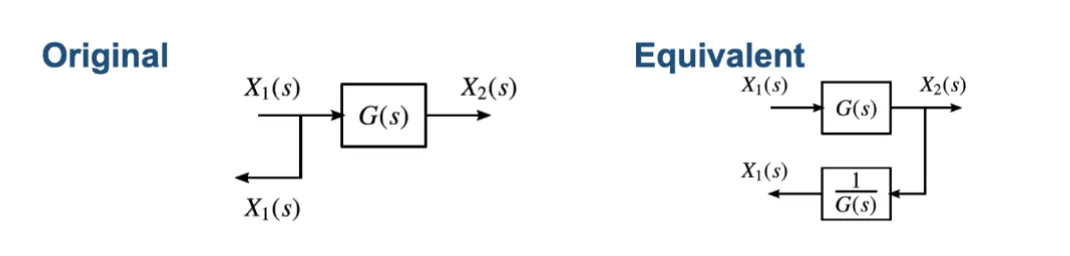
如果在块 的输入处有一个分支点,那么等效于把分支点提到块的输出处,每条被移过来的分支路径上都有一个相同的块 。
消除反馈回路
Section titled “消除反馈回路”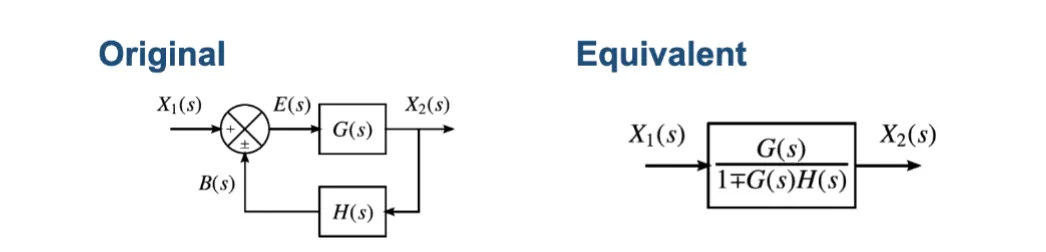
对于包含反馈回路的系统,设前向通路的传递函数为 ,反馈通路的传递函数为 。在求和点处,输入信号 与反馈信号 进行比较,产生误差信号 ,其中正号表示正反馈,负号表示负反馈。
根据框图关系,我们可以写出:
整理可得:
因此,闭环系统的等效传递函数为:
其中,负反馈时取正号(分母为 ),正反馈时取负号(分母为 )。特别地,对于单位负反馈系统(),等效传递函数简化为 。
运用这些规则,我们可以把一个复杂的系统框图简化成一个单一的传递函数,方便我们进行分析和设计。