Title: Block Diagram Reduction
Lecture @ 2026-3-16
方框图简化规则,位于 Part.1 Lec.2 最后一部分
快速回顾
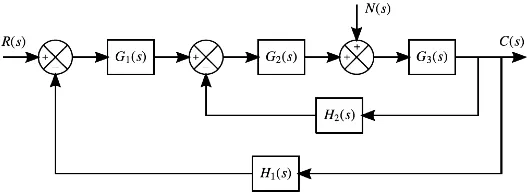
从一个简单的例子入手
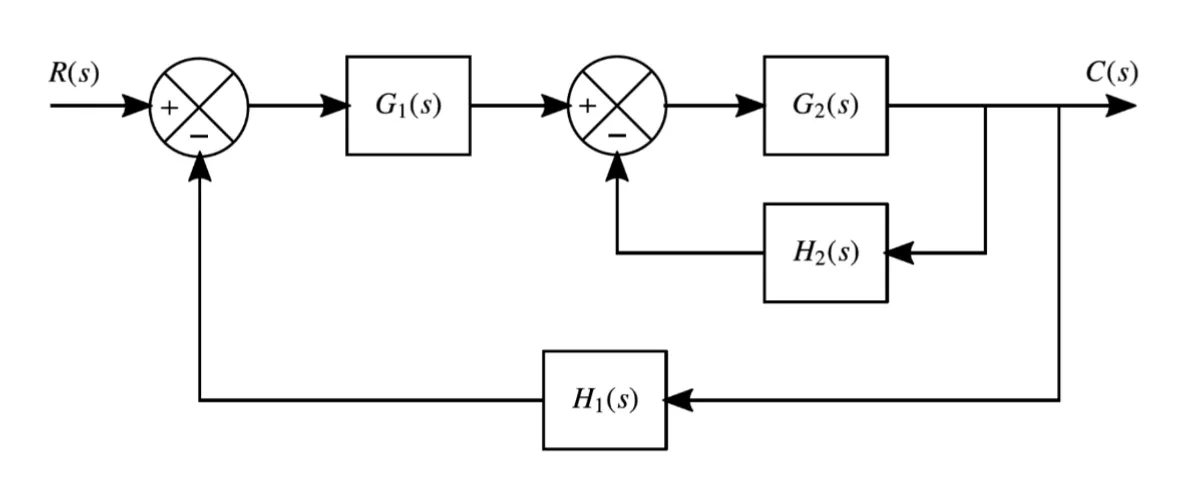
一个非常非常力大砖飞的方法是把每个中间信号都求出来,最后再把它们组合成一个单一的传递函数。比如在这里,我们有
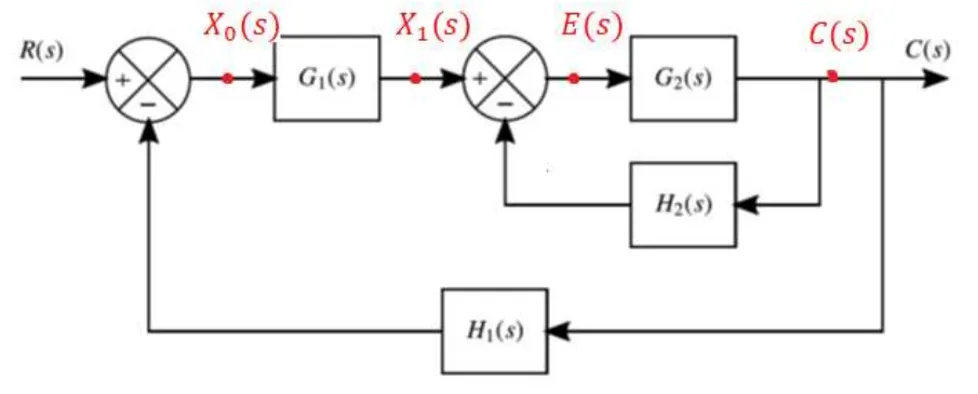
C(s)E(s)X1(s)X0(s)=E(s)G2(s)=x1(s)−C(s)H2(s)=X0(s)G1(s)=R(s)−C(s)H1(s)
然后把这个方程组联立带入,可以得到
C(s)=E(s)G2(s)=(X1(s)−C(s)H2(s))G2(s)=(X0(s)G1(s)−C(s)H2(s))G2(s)=[R(s)−C(s)H1(s)G1(s)−C(s)H2(s)]G2(s)=R(s)G1(s)G2(s)−C(s)H1(s)G1(s)G2(s)+C(s)H2(s)G2(s)
然后就有
R(s)C(s)=1+H1(s)G1(s)G2(s)+H2(s)G2(s)G1(s)G2(s)
可行,但是够麻烦,看到这么多的式子大脑先要栈溢出了。为了精神状态健康,我们可以选择换一种方法,也就是是我们之前提到的方框图简化方法。
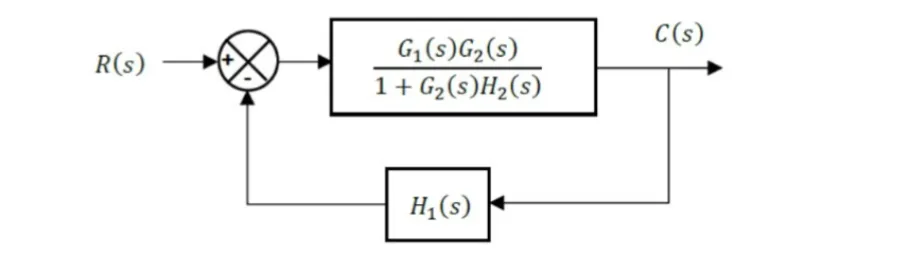
还是这个熟悉的图
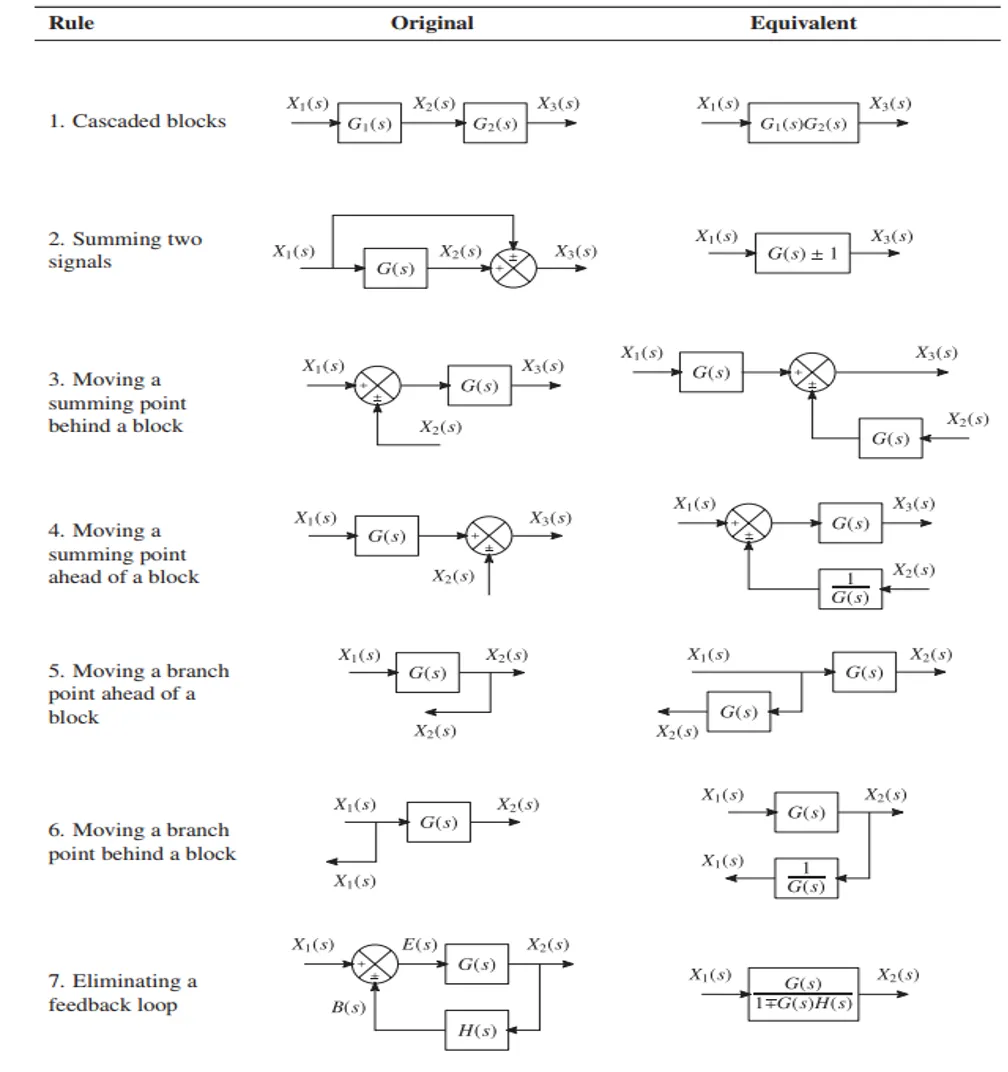
先使用第七条规则,去掉一个包括 G2(s) 和 H2(s) 的反馈回路
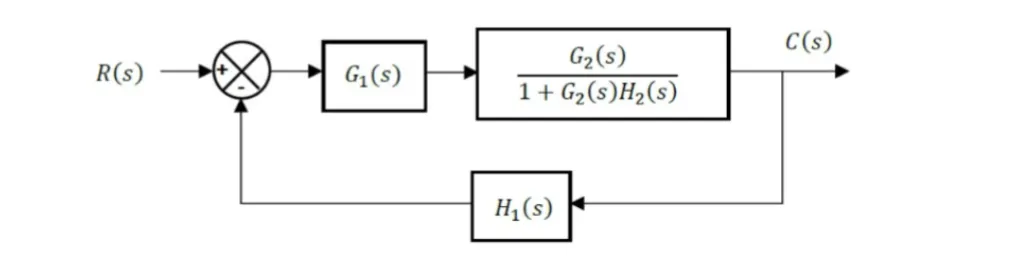
然后使用第一条规则,把级联的 G1(s) 和 1+G2(s)H2(s)G2(s) 合并成一个块
最后使用第七条规则,去掉剩下的反馈回路,就得到了最终的结果
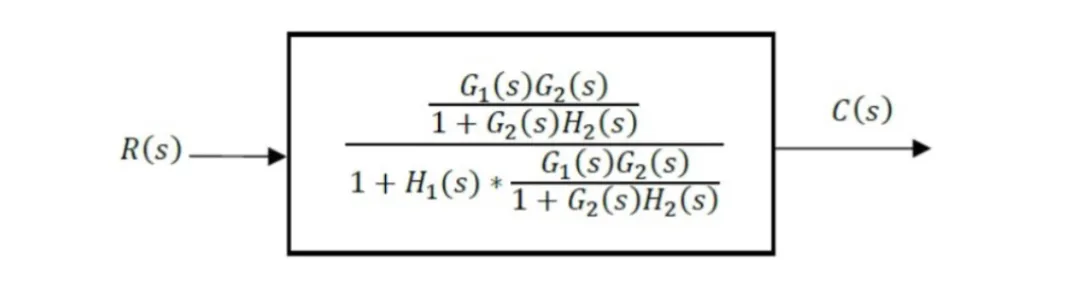
最后把式子简化一下,可以得到和之前一样的结果
R(s)C(s)=1+H1(s)G1(s)G2(s)+H2(s)G2(s)G1(s)G2(s)
简单清晰快捷,精神状态健康,而且更重要的是,这个方法可以让我们更好地理解系统的结构和行为,而不是被一大堆复杂的数学式子淹没。
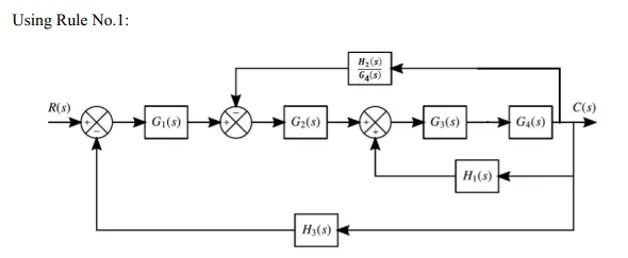
俗话说得好,只要肯做题,就有做不完的题。我们再来看看另一个例子。
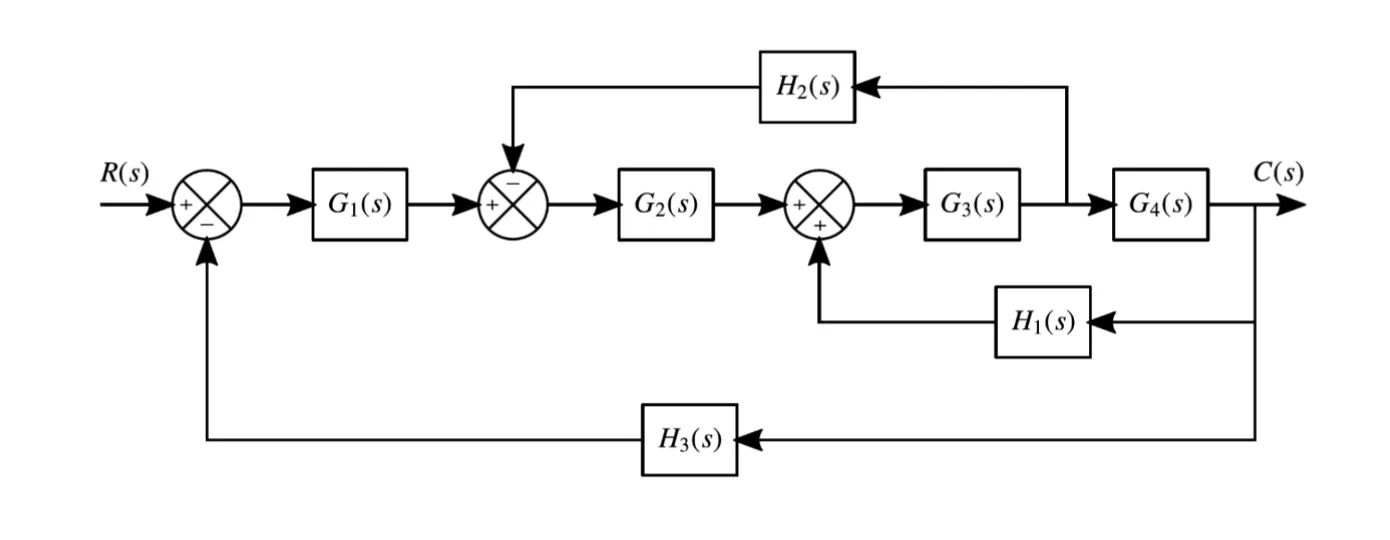
先使用第六条,把 H2(s) 的分支入口后移到 G2(s) 的输出处
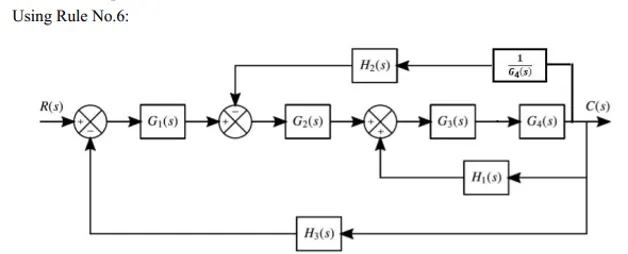
然后使用第一条消除级联的块
然后使用第一条和第七条,消除最右边的反馈回路
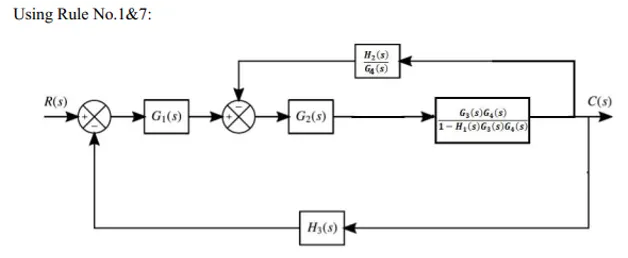
然后使用第一条,把级联的块合并成一个块
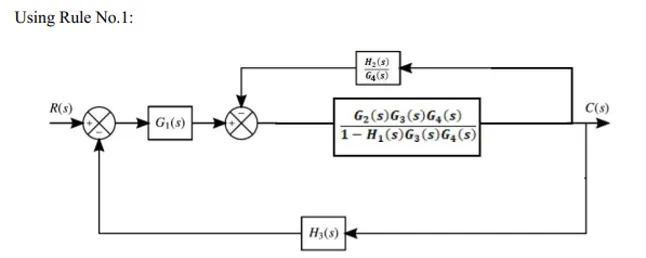
类似的,使用第七条,消除剩下的反馈回路
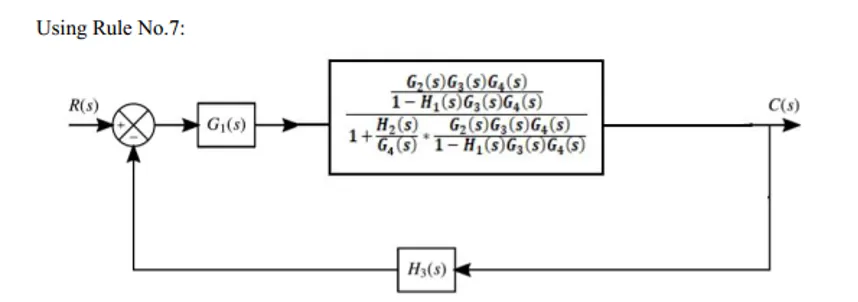
类似的,使用第一条和第七条,解决掉剩下的级联块和反馈回路
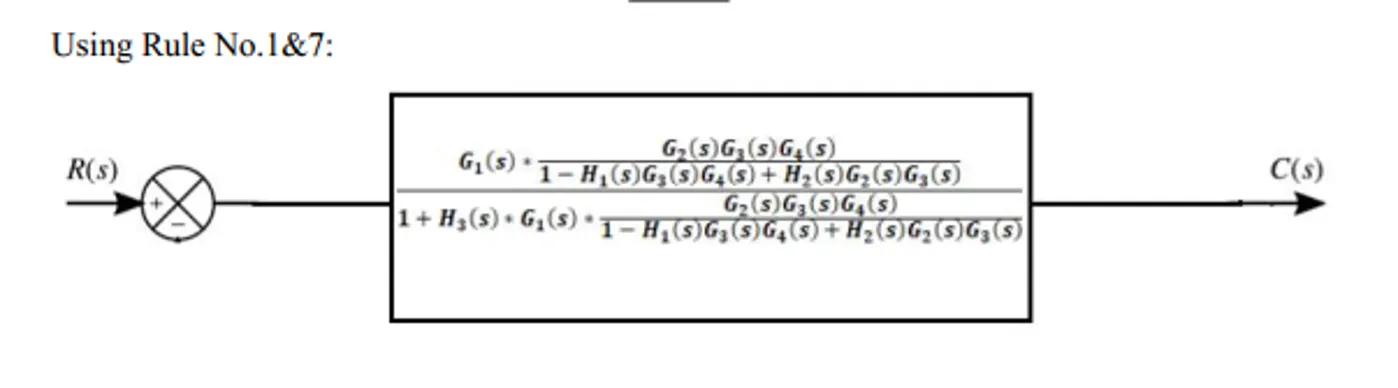
然后把这个叠了四层的东西化简,注意保持 san 值稳定
F(s)=R(s)C(s)=1−H1(s)G3(s)G4(s)+H2(s)G2(s)G3(s)+H3(s)G1(s)G2(s)G3(s)G4(s)G1(s)G2(s)G3(s)G4(s)
对于一个受扰动的闭环控制系统,为了抑制工厂稳态运行中的扰动,可以通过拆分传递函数来纳入对工厂的扰动。
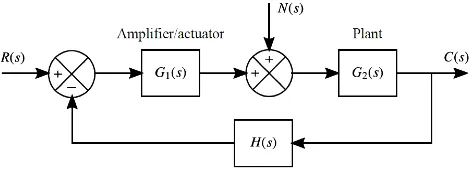
对于上图中的系统, N(s) 是扰动输入, C(s) 是系统的输出, R(s) 是系统的参考输入, H(s) 是系统的反馈传递函数, G1(s) 是放大器的传递函数, G2(s) 是设备的传递函数。
对于一个线性系统,叠加原理 (Superposition Principle) 成立,也就是如果需要同时响应输入和扰动,可以分别计算它们的响应,然后把它们叠加起来得到总响应。
对于分别分析的情况,也就是分别认为 N(s) 和 R(s) 是系统的唯一输入,我们可以得到两个单独的传递函数:
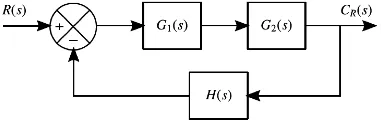
对于只考虑参考输入 R(s) 的情况,系统的输出 C(s) 与 R(s) 的关系可以表示为:
R(s)C(s)=1+H(s)G1(s)G2(s)G1(s)G2(s)
化简后的框图如图所示:
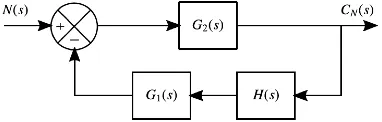
而对于只考虑扰动输入 N(s) 的情况,系统的输出 C(s) 与 N(s) 的关系可以表示为:
N(s)C(s)=1+H(s)G1(s)G2(s)G2(s)
化简后的框图如图所示:
为了获得整体的响应,使用式子 C(s)=CR(s)+CN(s),我们可以把两个单独的响应叠加起来:
C(s)=1+H(s)G1(s)G2(s)G1(s)G2(s)R(s)+1+H(s)G1(s)G2(s)G2(s)N(s)=1+H(s)G1(s)G2(s)(G1(s)+G2(s))R(s)+G2(s)N(s)
俗话说得好,只要肯做题,就有做不完的题,但是我其实可以选择不做
但是如果你想要的话……
尝试着计算出这个系统的等效传递函数
答案在 Moodle 上的 Example Answer Lecture - III.pdf 中
