
控制系统稳定性
Title : Control System Stability
Lecture @ 2026-3-17
传递函数性质
Section titled “传递函数性质”传递函数指的是系统的输入与输出之间的关系,通常表示为一个分式,其中分子和分母都是多项式。它分离了一个系统的输入和输出,用代数的方法描述了系统的动态行为,并且提供了可组合性。
换句话说,一般的形式是
对于一个传递函数,我们关注的有这么几个特性
- 零点 (Zeros):传递函数分子多项式的根,即使系统输出为零的输入值。
- 极点 (Poles):传递函数分母多项式的根,即使系统输出趋于无穷大的输入值。
- 特征方程 (Characteristic Equation):由传递函数的分母多项式等于零得到的方程,极点就是特征方程的根。
这里是考虑复数和重根的情况,所以对于一个 n 次多项式方程,它应该有 n 个根(包括复数根和重根)。这些根的位置对于系统的稳定性和动态响应有重要影响。我们可以把这些根画在复平面 (s-plane) 上:
一般用圈表示零点,用叉表示极点。
所谓 “稳定”
Section titled “所谓 “稳定””对于一个 线性时不变系统 (LTI) ,系统稳定性,指的是一个系统遇到一个瞬态响应是否会衰减。具体到我们刚刚提到的复平面上,指的就是极点的位置的横坐标——也就是实部的影响。
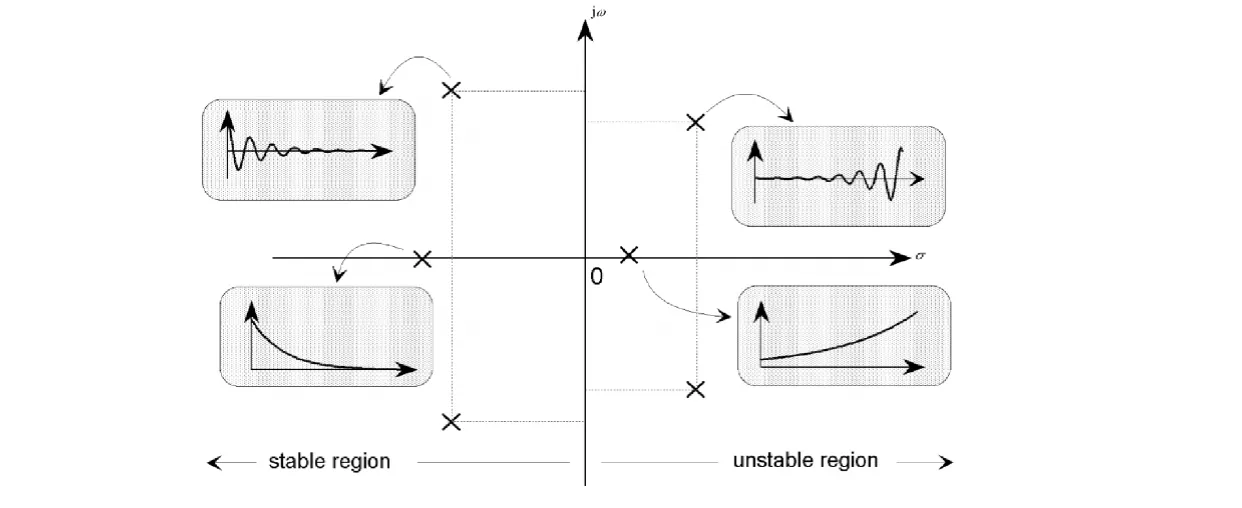
实部 的符号决定了系统的稳定性:小于 的系统是稳定的,等于 的系统是临界稳定的,大于 的系统是不稳定的。
做不完的题
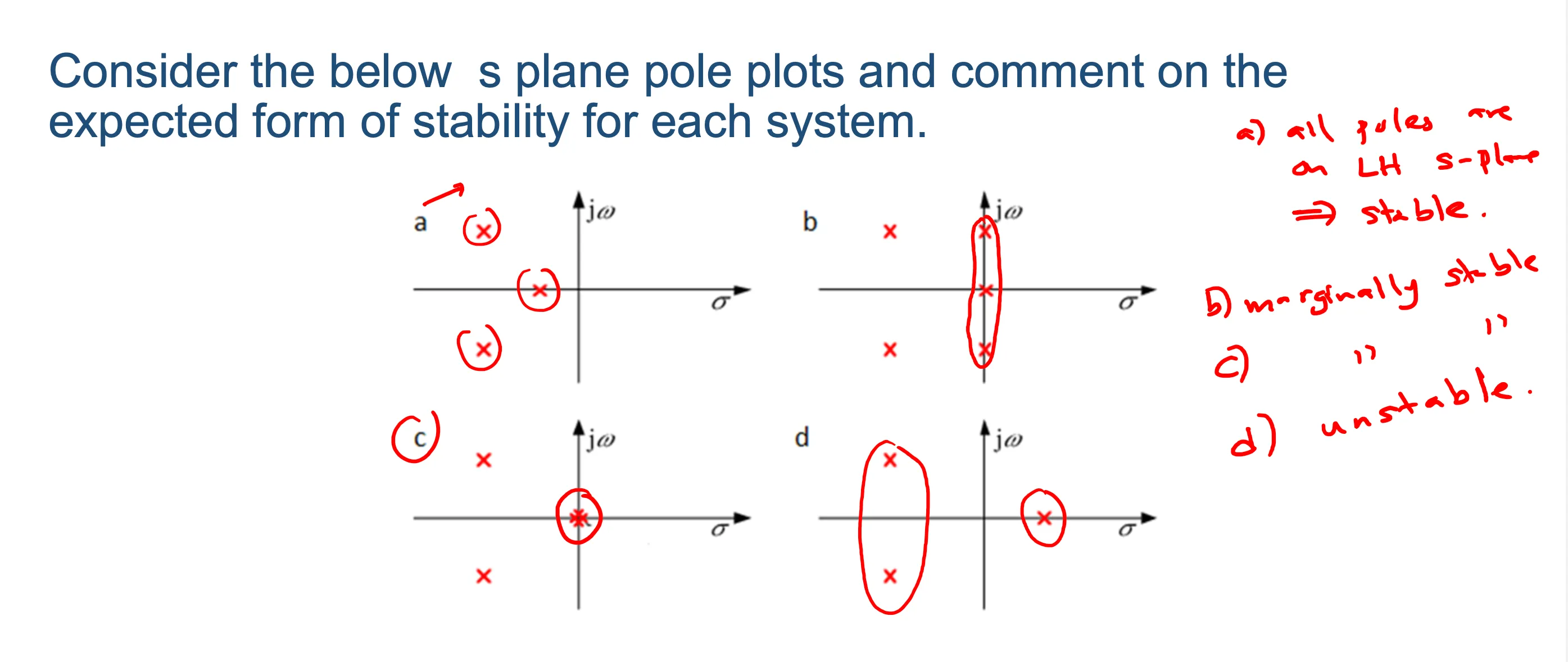
考虑以下 s 平面极点图,并对每个系统的稳定性情况进行评估。
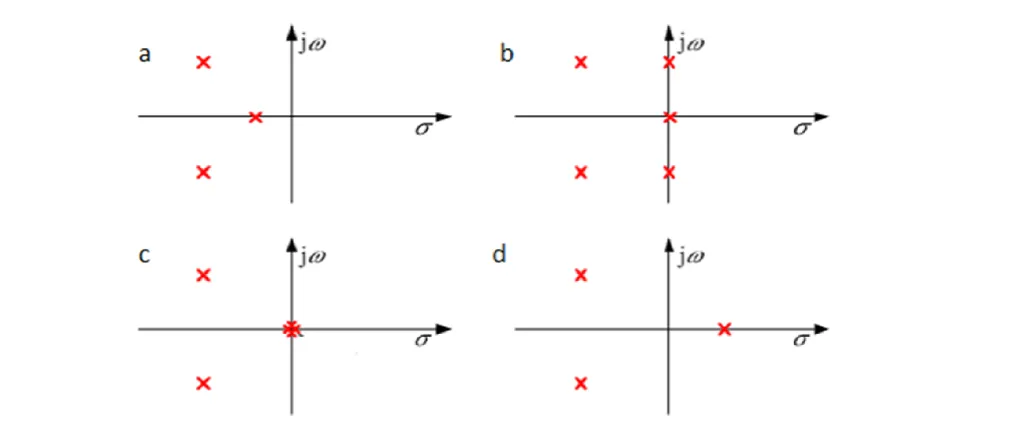
答案
- 对于 a,所有极点的实部都小于 ,因此系统是稳定的。
- 对于 b,有三个极点位于虚轴上,实部为 ,因此系统是临界稳定的。
- 对于 c,有一个极点的实部大于 ,因此系统是不稳定的。
- 对于 d,同样的,有一个极点的实部大于 ,因此系统也是不稳定的。
劳斯稳定判据 (Routh’s Stability Criterion)
Section titled “劳斯稳定判据 (Routh’s Stability Criterion)”劳斯稳定判据是一种允许在不求解 很恶心的 高阶方程的根的情况下判断系统的稳定性
稳定性的一个必要 (但是不充分)条件是特征多项式的所有系数都是正数,也就是这里的
劳斯稳定判据则是指:当且仅当劳斯阵列的第一列的所有元素都为正数时,系统是稳定的。
理论上接下来就该讲劳斯阵列的构建了,但是确实没有,逻辑上卡在这里了
如果想要了解的话这有个 CSDN 链接 讲的很清楚